Tenemos la conexion del arduino con la matriz 8x8, el siguiente paso a ser sera el conectar el dispositivo de controlo de movimiento llamado Joystick.


void setup() {
for (int j=2; j<19; j++)
pinMode(j, OUTPUT);
}
void loop() {
for (int j=2; j<10; j++) {
digitalWrite(j, HIGH); //Levantamos la columna
for (int k= 10 ; k<18 ; k++) {
digitalWrite(k, LOW); //Encendemos el punto
delay(250);
digitalWrite(k, HIGH); //Apagamos el punto
}
digitalWrite(j, LOW); //Bajamos la columna
}
}




 Se llega a caracterizar por:
Se llega a caracterizar por:
#include <Servo.h>
Servo myservo; //crea un referencia al servo motor
int pos = 0; //posición inicial del servo
int positions[] = {0, 45, 90, 135, 180}; //posiciones (en grados) para moverse
int numPositions = 5; //cantidad de posiciones disponibles
void setup()
{
//control servo motor via pin 9
myservo.attach(9, 650, 2350);
Serial.begin(9600);
}
void loop()
{
int i = 0;
//cambia de posiciones
for(i = 0; i < numPositions; i++)
{
pos = positions[i];
//print debug output
Serial.println("SETTING:");
Serial.println(pos);
//cambio de posicion del servo a una nueva
myservo.write(pos);
//espero dos segundos
delay(2000);
}
}
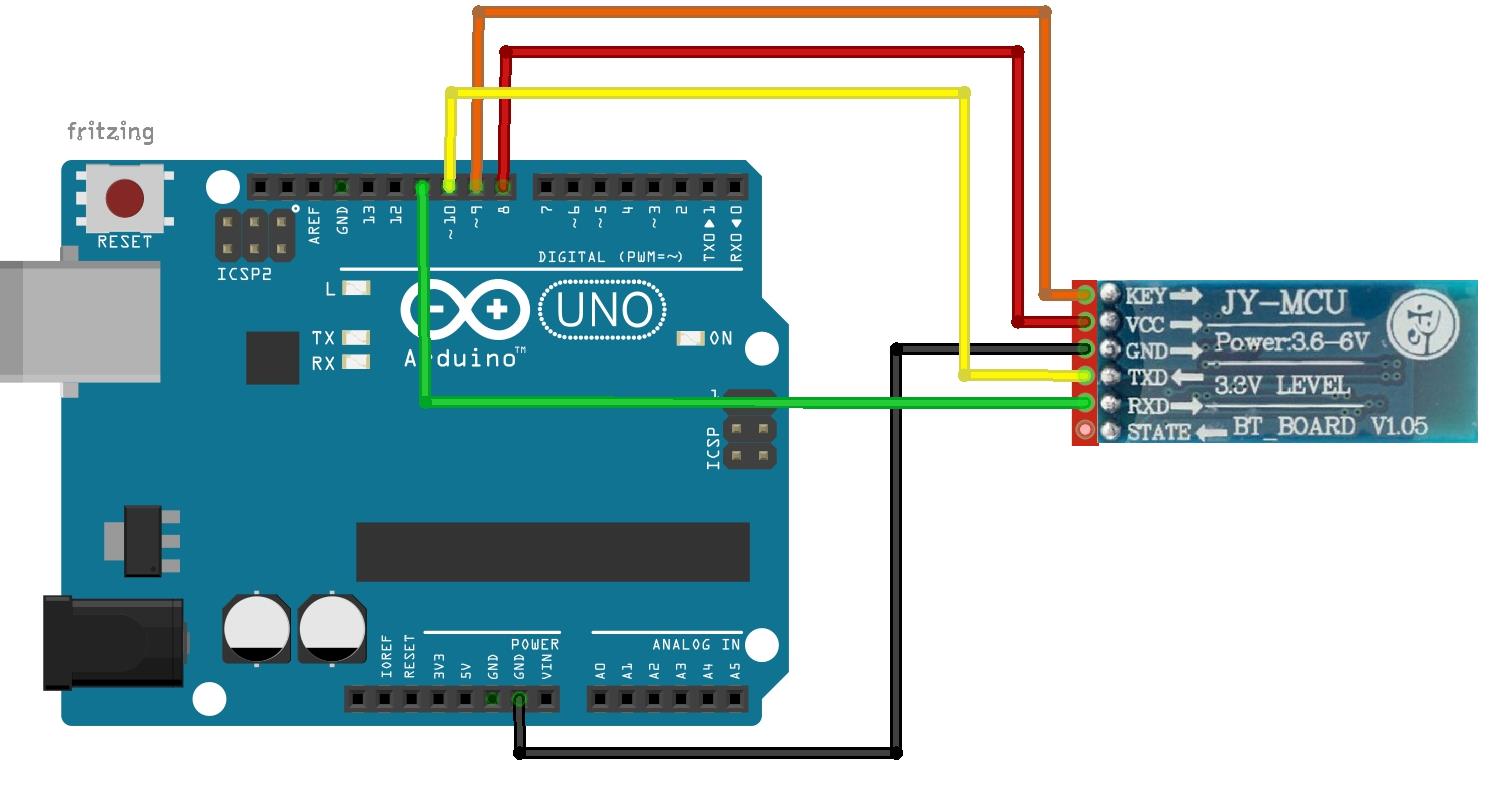
#include <SoftwareSerial.h>
SoftwareSerial BT1(10, 11); // RX | TX
void setup()
{ pinMode(8, OUTPUT); // Al poner en HIGH forzaremos el modo AT
pinMode(9, OUTPUT); // cuando se alimente de aqui
digitalWrite(9, HIGH);
delay (500) ; // Espera antes de encender el modulo
Serial.begin(9600);
Serial.println("Levantando el modulo HC-06");
digitalWrite (8, HIGH); //Enciende el modulo
Serial.println("Esperando comandos AT:");
BT1.begin(57600);
}
void loop()
{ if (BT1.available())
Serial.write(BT1.read());
if (Serial.available())
BT1.write(Serial.read());
}



 Avanze
Avanze






